| Phase | Task | Duration |
| Phase 1: Research and planning | Literature review on Hospital sanitisation techniques, defining scope. Algorithm planning methods. | 15 days |
| Phase 2: Existing Robot design Research and Ideation | Inspiration gathered from existing solutions. Concept design drawn up. | 9 days |
| Phase 3: Robot design (Solidworks) | Robot modelled on Solidworks | 9 days |
| Phase 4: Sensor and navigation integration | Integrating Sensors in simulated environment. | 8 days |
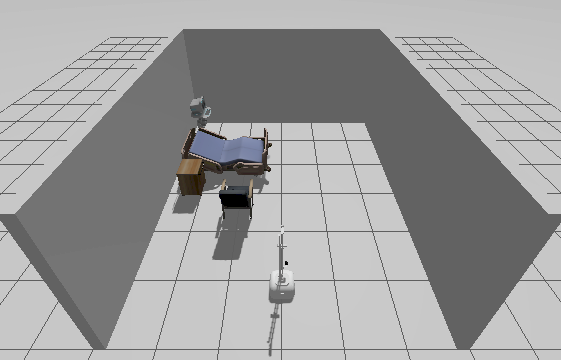
| Phase 5: Simulation and testing | Simulated environment setup fully. Gazebo and ROS used. | 15 days |
| Phase 6: Refinement and performance optimisation | Debugging, enhancing program. | 8 days |
| Phase 7: cost and feasibility analysis | Analysis of efficiency of algorithms and techniques | 7 days |
| Phase 8: Final report and presentation preparation | Compiling findings, presentation and report finalised. | 8 days |
| Phase 9: Proof reading, and review. | Final check. | 5 days |